دستگاه فرز حفاری سر مخالف BOSM -6010
1. استفاده از ماشین:
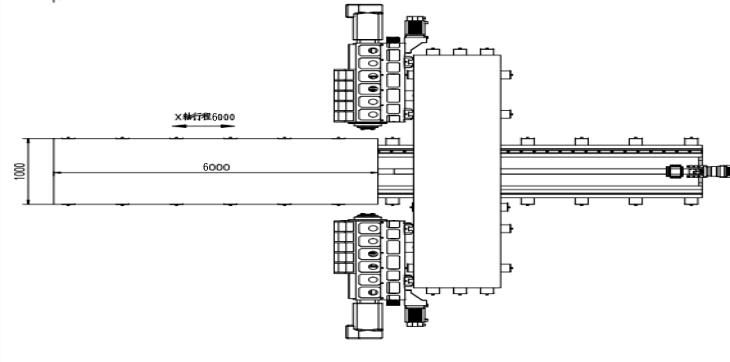
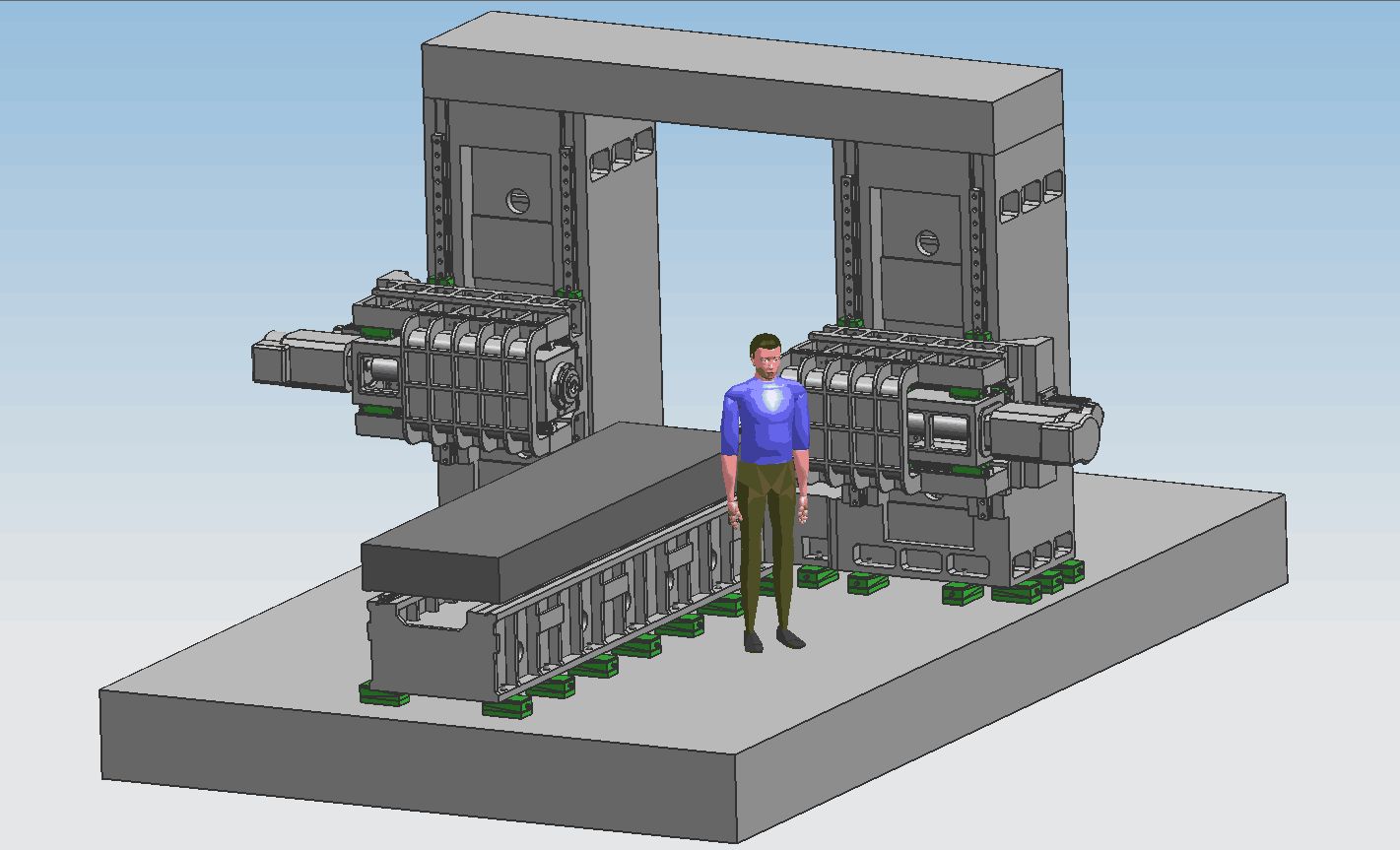
BOSM- 6000 * 1000 پرتو ثابت CNC دروازه ای دو ستون حفاری و فرز یک ماشین ابزار ویژه برای پردازش بازوها / چوب بیل مکانیکی است. بالش، می تواند پردازش سریع قطعه کار را درک کند، قطعه کار را می توان در محدوده ضربه موثر حفاری، آسیاب و حفاری کرد، قطعه کار را می توان در یک زمان در محل پردازش کرد (بدون نیاز به بستن ثانویه)، سرعت بارگیری و تخلیه سریع است، سرعت موقعیت یابی سریع است و دقت پردازش بالا است. راندمان پردازش بالا و بالا.
2.ساختار ماشینیویژگی ها:
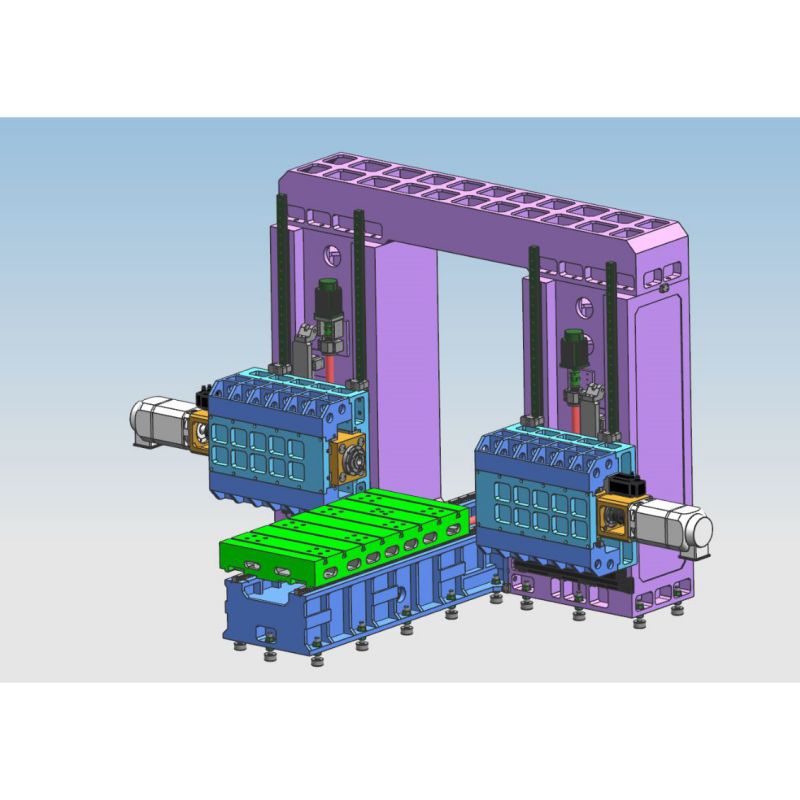
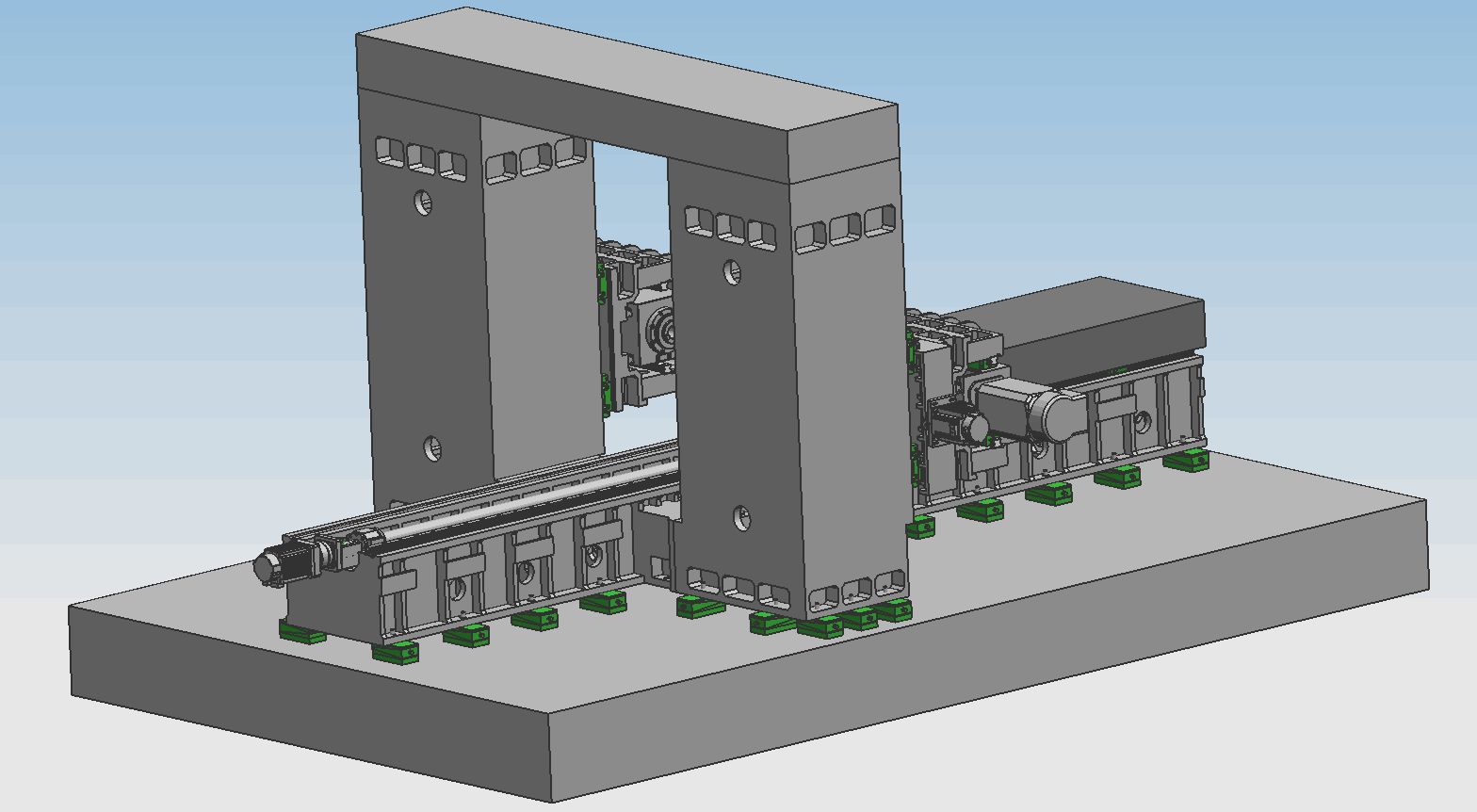
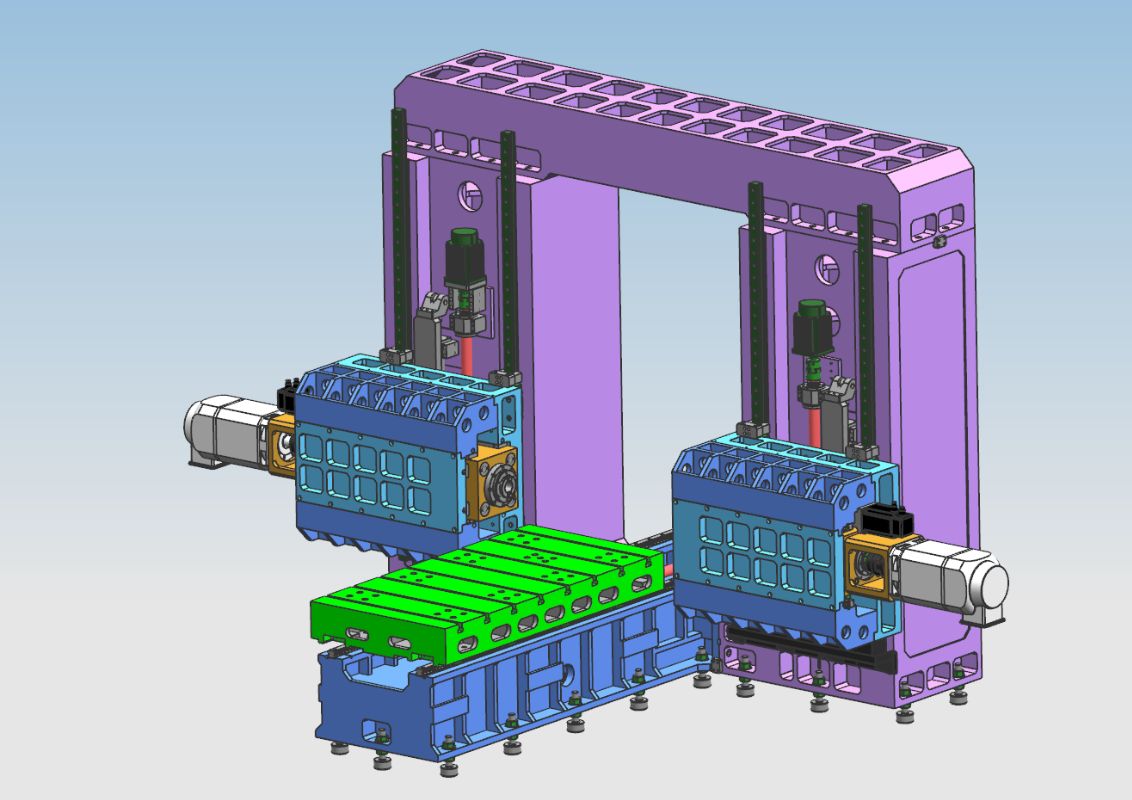
اجزای اصلی ماشین ابزار: تخت، میز کار، ستون های چپ و راست، تیرها، تیرهای اتصال دروازه ای، زین، قوچ و غیره، قطعات بزرگ از قالب گیری شن و ماسه رزینی، ریخته گری 250 آهن خاکستری با کیفیت بالا، آنیل شده در گرم گودال شن ← پیری ارتعاش ← عملیات حرارتی بازپخت کوره← پیری ارتعاش← ماشینکاری خشن← پیری ارتعاش← بازپخت کوره داغ← پیری ارتعاشی← تکمیل، تنش منفی قطعات را به طور کامل از بین برده و عملکرد قطعات را ثابت نگه می دارد. تخت ثابت، ستون های چپ و راست، دروازه و میز کار حرکت می کنند. این کارکردهای فرز، حفاری، حفاری، ضد غرق کردن، ضربه زدن و غیره را دارد. روش خنک کننده ابزار خنک کننده خارجی است. ماشین ابزار شامل 5 محور تغذیه است که می تواند اتصال 4 محوری و تک عملی 5 محوری را تحقق بخشد. 2 عدد سر پاور وجود دارد. محور ماشین ابزار و سر پاور در شکل زیر نشان داده شده است.
2.1ساختار اصلی بخش تغذیه انتقال محوری
2.1.1. محور X:میز کار به صورت جانبی در امتداد ریل راهنمای تخت ثابت حرکت می کند.
X 1- محور محرک: سروو موتور AC به اضافه کاهنده سیاره ای با دقت بالا توسط بال مارپیچ هدایت می شود تا حرکت میز کار را برای تحقق حرکت خطی محور X هدایت کند.
فرم راهنما: دو ریل راهنمای خطی با دقت بالا قرار دهید.
2.1.2 محور Z1:سر برق و یک زین به صورت عمودی در قسمت جلوی ستون نصب می شوند و در امتداد ریل راهنمای ستون به سمت بالا و پایین حرکت می کنند.
انتقال محور Z1: موتور سروو AC و چرخ سنکرون برای به حرکت درآوردن بال اسکرو برای به حرکت درآوردن زین برای تحقق حرکت خطی محور Z استفاده می شود.
2.1.3 محور Z2:سر برق و یک زین به صورت عمودی در قسمت جلوی ستون نصب می شوند و در امتداد ریل راهنمای ستون به سمت بالا و پایین حرکت می کنند.
انتقال محور Z2: موتور سروو AC و چرخ سنکرون برای به حرکت درآوردن بال اسکرو برای به حرکت درآوردن زین برای تحقق حرکت خطی محور Z استفاده می شود.
2.1.4 محور Y1:زین سر پاور به صورت عمودی در سمت جلوی ستون سمت راست نصب می شود و در امتداد ریل راهنمای ستون به چپ و راست حرکت می کند.
انتقال محور Y1: سروو موتور AC به اضافه کاهنده سیاره ای با دقت بالا برای حرکت دادن قوچ به سمت بال اسکرو استفاده می شود تا حرکت خطی محور Y1- را درک کند.
2.1.5 محور Y2:زین سر پاور به صورت عمودی در قسمت جلوی ستون سمت راست نصب می شود و در امتداد ریل راهنمای ستون به چپ و راست حرکت می کند.
انتقال محور Y2: سروو موتور AC به اضافه کاهنده سیاره ای با دقت بالا برای حرکت رم به سمت بال اسکرو برای تحقق حرکت خطی محور Y2 استفاده می شود.
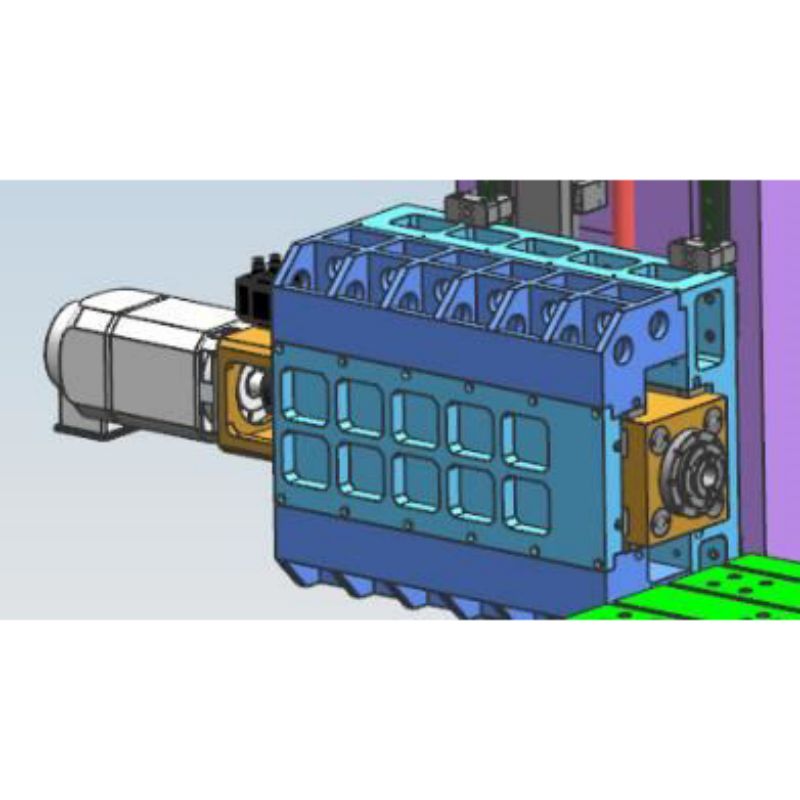
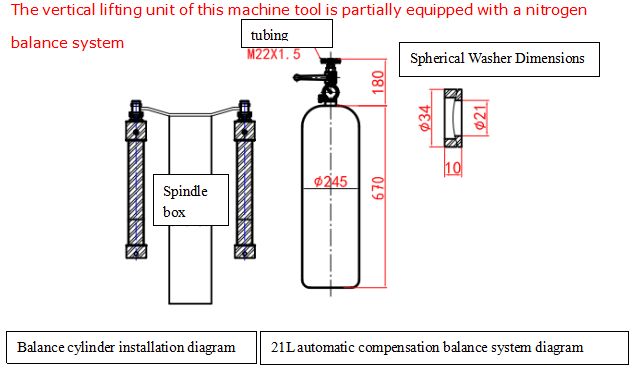
2.2 جهت حرکت سر قدرت حفاری و فرز (شامل سر برق 1 و 2) توسط 4 جفت ریل راهنمای غلتکی خطی هدایت می شود و درایو از موتور سروو AC برای به حرکت درآوردن تسمه سنکرون (i=2) و توپ دقیق استفاده می کند. انتقال جفت پیچ هد برقی از سروو استفاده می کند موتور توسط تسمه سنکرون و چرخ سنکرون کاهش می یابد و توسط جفت ریل راهنمای دقیق هدایت می شود و بال اسکرو عمودی را به چرخش در می آورد تا حرکت عمودی سر قدرت را درک کند. همچنین مجهز به نوار تعادل نیتروژن برای کاهش سر به پیچ و موتور سروو است. موتور محور Z دارای عملکرد ترمز خودکار است. در صورت قطع برق، ترمز اتوماتیک محور موتور را محکم نگه می دارد تا نتواند بچرخد. هنگام کار، زمانی که مته قطعه کار را لمس نمی کند، به سرعت تغذیه می شود. هنگامی که مته قطعه کار را لمس می کند، به طور خودکار به خوراک کاری تبدیل می شود. هنگامی که مته به قطعه کار نفوذ می کند، به طور خودکار به عقب سریع تغییر می کند. هنگامی که انتهای مته قطعه کار را ترک می کند و به موقعیت تنظیم شده می رسد، میز کار برای تحقق گردش خودکار به موقعیت سوراخ بعدی منتقل می شود. سر برق از ترکیب سیم و ریل سخت استفاده می کند که نه تنها سرعت عملکرد تجهیزات را تضمین می کند، بلکه استحکام تجهیزات را نیز بسیار افزایش می دهد. و می تواند عملکردهای حفاری سوراخ کور، فرز، پخ زدن، شکستن تراشه، برداشتن تراشه خودکار و غیره را درک کند که بهره وری نیروی کار را بهبود می بخشد.
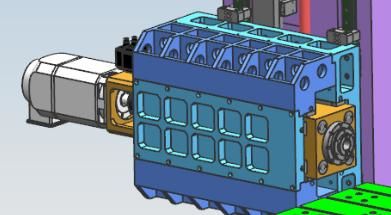
(سر برق سمت چپ)
2.3. حذف تراشه و خنک کننده
نوار نقاله های تراشه های زنجیره ای مارپیچی و تخت در دو طرف زیر میز کار نصب شده اند و تراشه ها را می توان به طور خودکار در انتها از طریق دو مرحله صفحات مارپیچ و زنجیره ای به نوار نقاله تراشه تخلیه کرد تا تولید متمدنانه را تحقق بخشد. یک پمپ خنک کننده در مخزن خنک کننده نوار نقاله تراشه وجود دارد که می توان از آن برای خنک سازی خارجی ابزار برای اطمینان از عملکرد حفاری و عمر مفید مته استفاده کرد و مایع خنک کننده قابل بازیافت است.
3. سیستم کنترل عددی کامل دیجیتال:
3.1. با عملکرد شکستن تراشه، زمان شکستن تراشه و چرخه شکستن تراشه را می توان در رابط انسان و ماشین تنظیم کرد.
3.2. با عملکرد بلند کردن ابزار، ارتفاع بلند کردن ابزار را می توان بر روی رابط انسان و ماشین تنظیم کرد. هنگامی که حفاری به این ارتفاع رسید، مته به سرعت به بالای قطعه کار بلند می شود و سپس براده ها دور ریخته می شوند و سپس به سرعت به سطح حفاری منتقل می شوند و به طور خودکار به کار تبدیل می شوند.
3.3. جعبه کنترل عملیات متمرکز و واحد دستی سیستم کنترل عددی را اتخاذ کرده و به رابط USB و نمایشگر کریستال مایع LCD مجهز شده است. به منظور تسهیل برنامه نویسی، ذخیره سازی، نمایش و ارتباطات، رابط عملیات دارای عملکردهایی مانند گفتگوی انسان و ماشین، جبران خطا و هشدار خودکار است.
3.4. این تجهیزات عملکرد پیش نمایش و بازرسی مجدد موقعیت سوراخ را قبل از پردازش دارد و عملیات بسیار راحت است.
3.5. روانکاری اتوماتیک
جفت ریل راهنمای خطی دقیق ماشین ابزار، جفت پیچ توپ دقیق و سایر جفت های حرکتی با دقت بالا مجهز به سیستم های روانکاری خودکار هستند. پمپ روانکار اتوماتیک روغن تحت فشار را تولید می کند و محفظه کمی روغن روان کننده وارد روغن می شود. پس از پر شدن محفظه روغن با روغن، هنگامی که فشار سیستم به 1.4-1.75 مگاپاسکال افزایش یافت، سوئیچ فشار در سیستم بسته می شود، پمپ متوقف می شود و شیر تخلیه همزمان تخلیه می شود. هنگامی که فشار روغن در جاده به زیر 0.2 مگاپاسکال می رسد، روان کننده کمی شروع به پر کردن نقطه روانکاری می کند و یک پر کردن روغن را تکمیل می کند. با توجه به تامین دقیق روغن انژکتور کمی روغن و تشخیص فشار سیستم، منبع روغن قابل اطمینان است و از وجود یک لایه روغن روی سطح هر جفت سینماتیک اطمینان میدهد، اصطکاک و سایش را کاهش میدهد و از آسیب به آن جلوگیری میکند. ساختار داخلی ناشی از گرمای بیش از حد ، برای اطمینان از دقت و عمر ماشین ابزار. در مقایسه با جفت ریل راهنمای کشویی، جفت ریل راهنمای خطی نورد مورد استفاده در این ماشین ابزار دارای یک سری مزایای است:
①حساسیت حرکت بالا است، ضریب اصطکاک ریل راهنمای نورد کوچک است، تنها 0.0025 ~ 0.01 است، و قدرت رانندگی به شدت کاهش می یابد، که تنها معادل 1/10 ماشین آلات معمولی است.
② تفاوت بین اصطکاک دینامیکی و ایستا بسیار کم است و عملکرد پیگیری عالی است، یعنی فاصله زمانی بین سیگنال رانندگی و عمل مکانیکی بسیار کوتاه است، که منجر به بهبود سرعت پاسخ و حساسیت می شود. سیستم کنترل عددی
③ برای حرکت خطی با سرعت بالا مناسب است و سرعت آنی آن حدود 10 برابر بیشتر از ریل های راهنمای کشویی است.
④ می تواند حرکت بدون شکاف را درک کند و استحکام حرکت سیستم مکانیکی را بهبود بخشد.
⑤ تولید شده توسط تولید کنندگان حرفه ای، دارای دقت بالا، تطبیق پذیری خوب و نگهداری آسان است.
4. محیط استفاده از ماشین:
منبع تغذیه: سه فاز AC380V ± 10% , 50Hz ± 1 دمای محیط: 0 ° ~ 45 °
5. اصلیپارامترهای فنی:
| مدل | BOSM6010 | |
| حداکثر اندازه قطعه کار پردازش | طول × عرض × ارتفاع (میلی متر) | 6000×1000×1500 |
| حداکثر تغذیه دروازه ای | عرض (میلی متر) | 1300 |
| اندازه میز کار | طول X عرض (میلی متر) | 6000*1000 |
|
سر حفاری از نوع قوچ افقی سر پاور یک دو
| مقدار (2) | 2 |
| مخروطی دوک | BT50 | |
| قطر حفاری (میلی متر) | Φ2-Φ60 | |
| قطر ضربه (میلی متر) | M3-M30 | |
| سرعت اسپیندل (r/min) | 30 تا 6000 | |
| قدرت موتور سروو اسپیندل (کیلووات) | 37 | |
| فاصله بینی تک دوکی از مرکز میز (میلی متر) | 150-650 | |
| فاصله مرکزی انتهای بینی دوک دوکی (میلی متر) | 300-1300 | |
| حرکت چپ و راست یک رام (میلی متر) | 500 | |
| فاصله بین مرکز قوچ و صفحه میز (mm) | 200-1700 | |
| حرکت بالا و پایین رم (mm) | 1500 | |
| تکرارپذیری | 300mm*300mm | 0.02 ± |
| ابعاد ماشین ابزار | طول × عرض × ارتفاع (میلی متر) | طبق نقشه ها |
| وزن ناخالص (t) | (تقریبا) 36 | |
پارامترهای فوق پارامترهای اولیه طراحی هستند. در طراحی واقعی، ممکن است با توجه به نیازهای پردازش قطعه کار و الزامات طراحی ماشین ابزار، تغییراتی ایجاد شود تا نیازهای قطعات پردازش شرکت شما را برآورده کند.